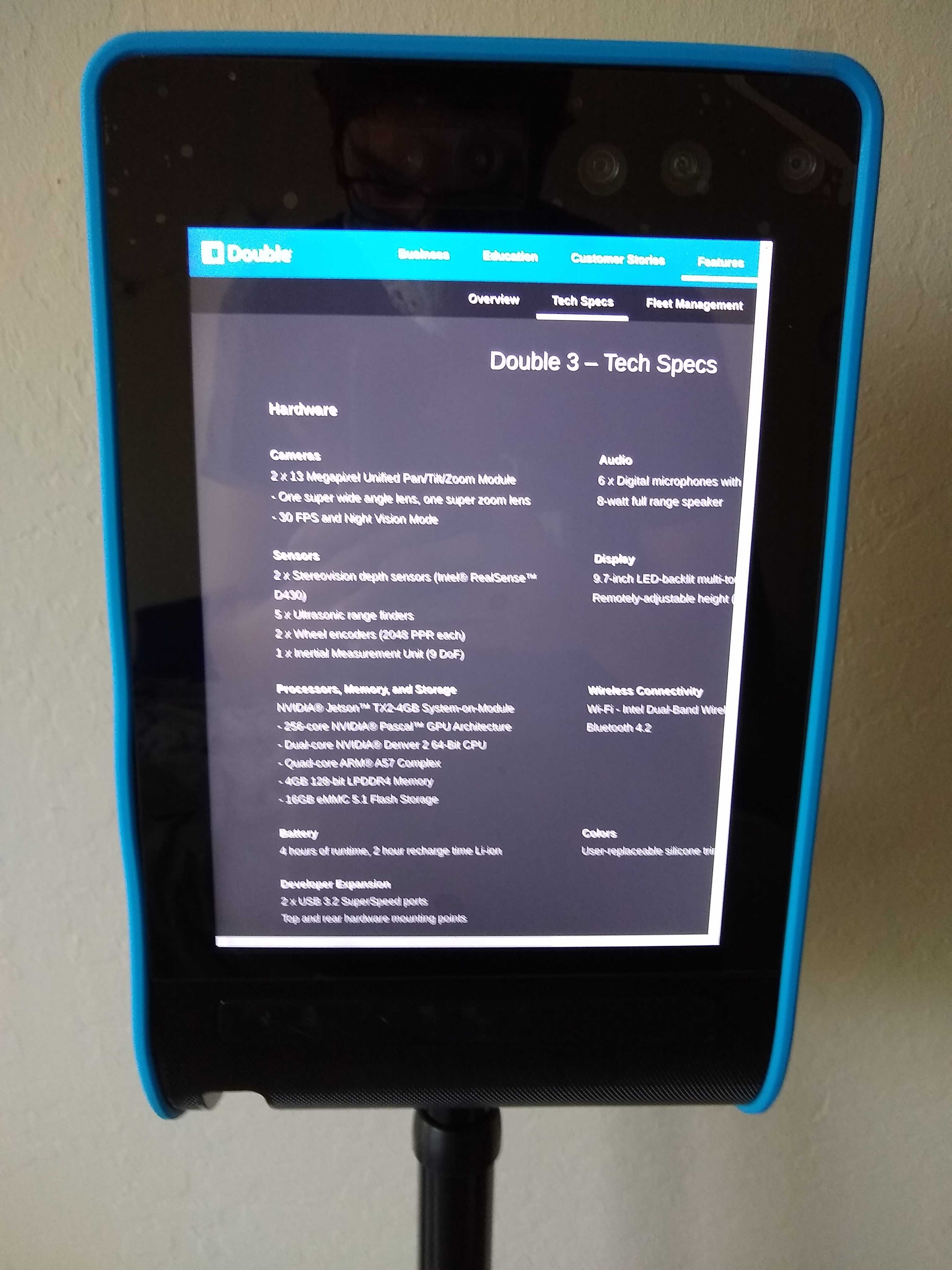
LCLS has purchased two remote presence robots to assist remote viewing and debugging of instrumentation at beam height where fixed overhead web cameras may have difficulty looking while an area is locked during beam delivery. https://www.doublerobotics.com/double3.html.
Current features:
- Driving and viewing
- User joins call with a web browser on PC, Mac, Linux, iPhone, Android, or mobile app on iOS with their unique login credentials
- Authorize audio and video (required)
- Receive video and audio feed from the Double 3, the robot has pan, and zoom options
- Take photo of current view
- Drive with point-and-click on ground or by navigating with arrow keys
- Built in collision avoidance works very well
- Built in stabilization, does not knock over
- Able to go over cables on the ground
- Auto-docking
- Screen sharing
- Share specific windows, e.g. interconnect or cable drawings, grafana pages, terminal output
- Share web window interactively, allow user at robot to navigate the webpage you share
- Share specific windows, e.g. interconnect or cable drawings, grafana pages, terminal output
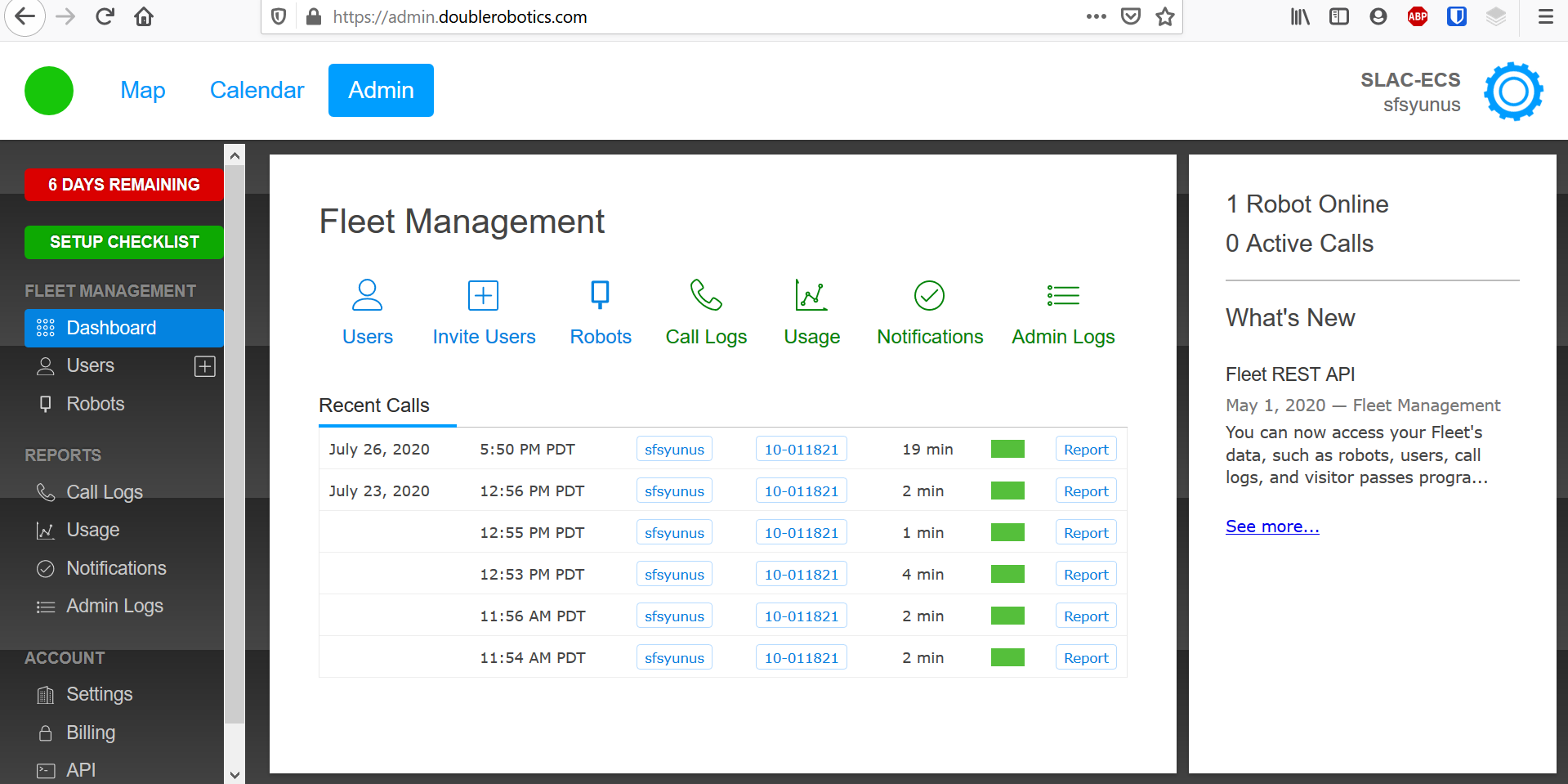
- Administrative controls: fleet usage
- Manage user access, allow multiple users with different usage privilege levels
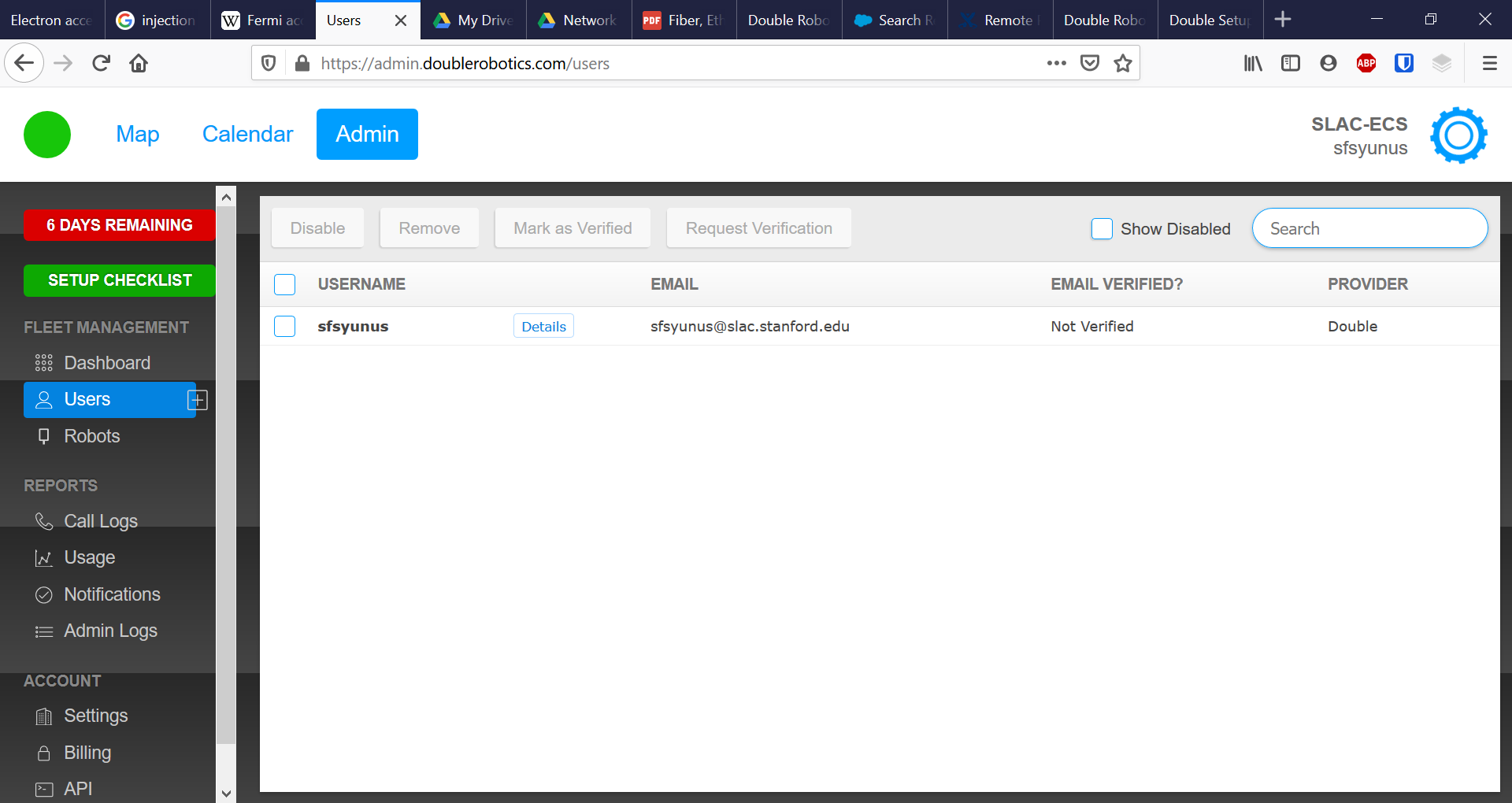
- Schedule users to avoid access conflict
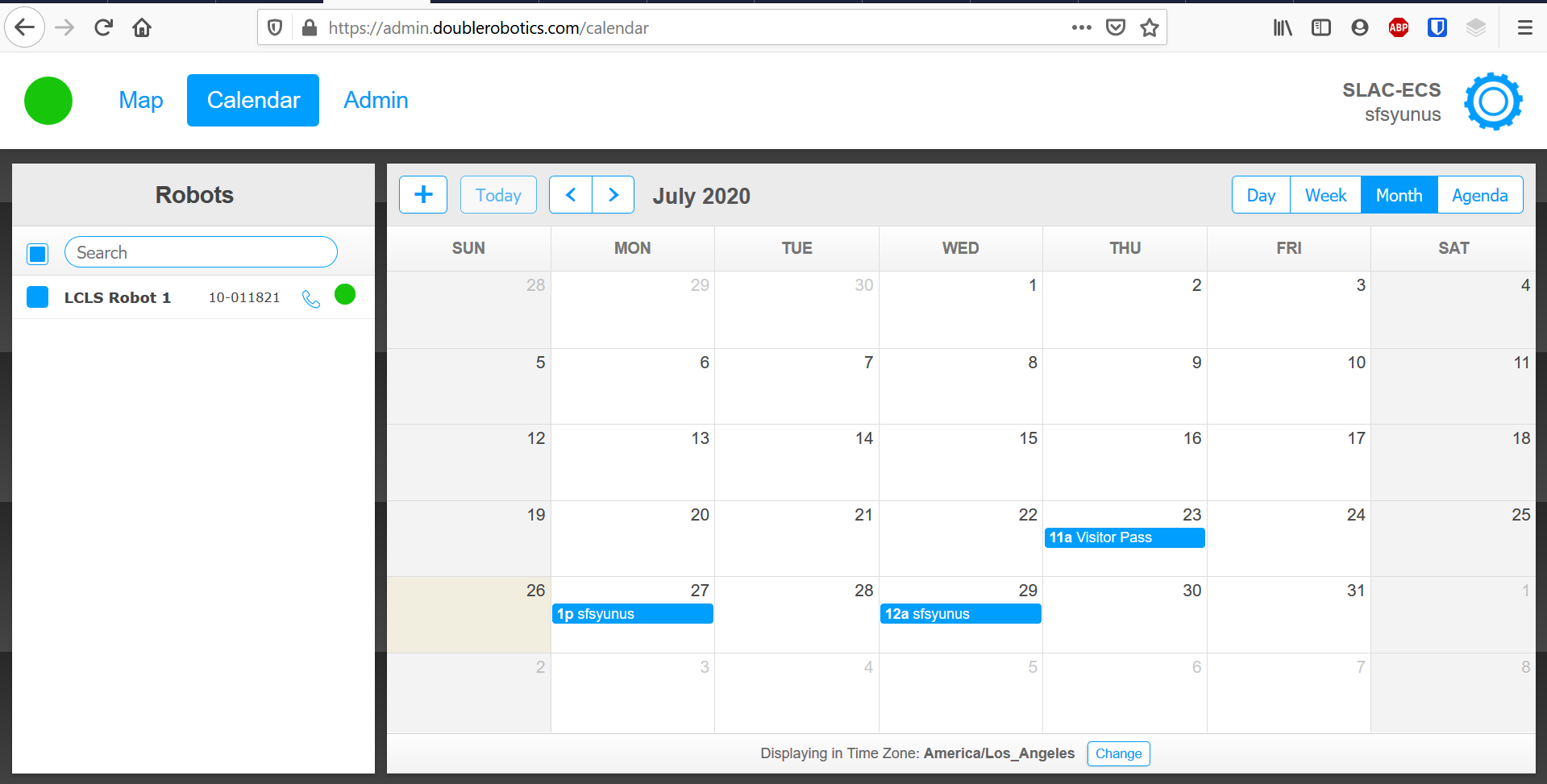
- Monitor calls, usage, drive time
- Manage user access, allow multiple users with different usage privilege levels
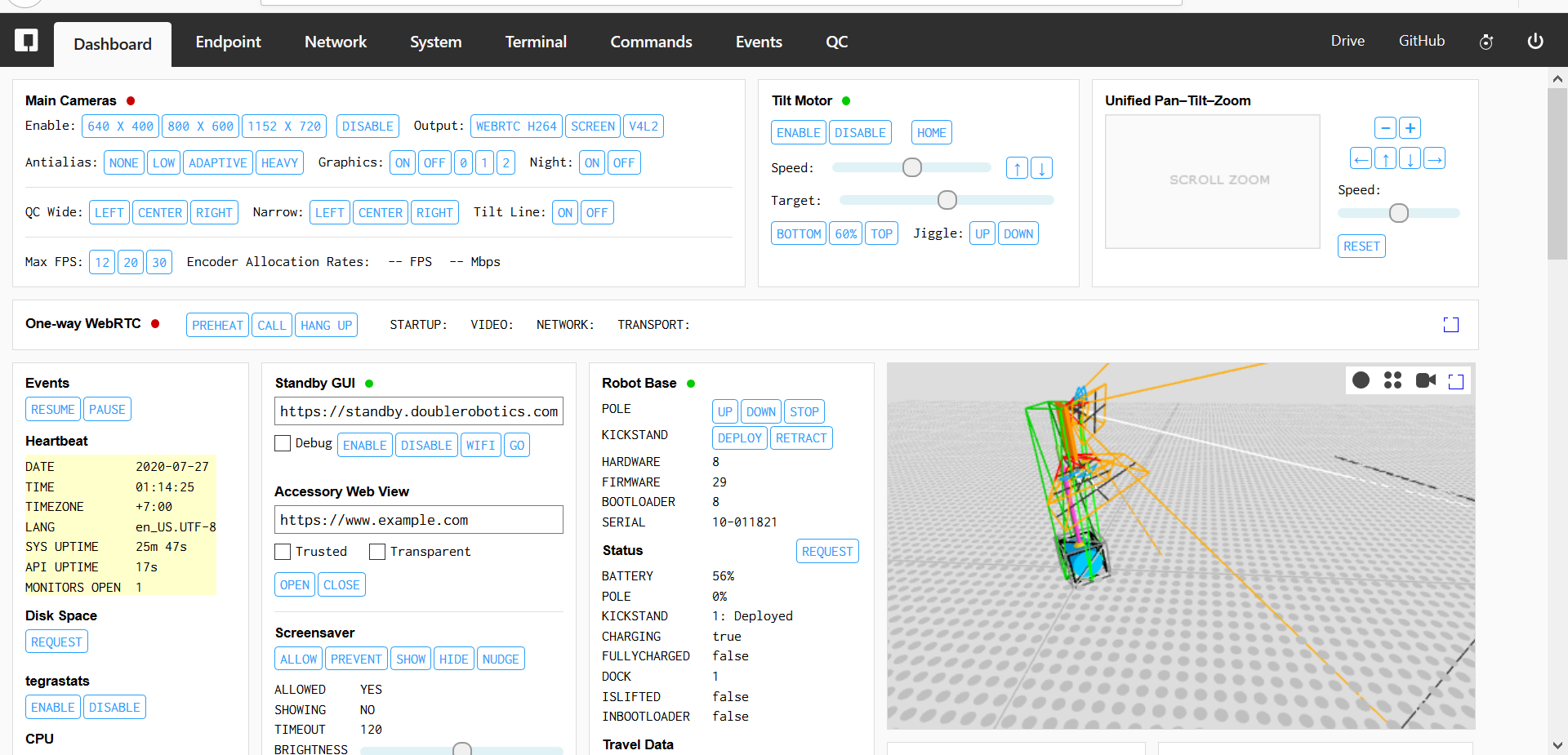
Developer features:
One of the units is enabled in developer mode, this allows development work with the base Unix environment that the robot is running on, as well as full access to the programming of the robot drive, and detectors.
Potential development features include:
- Enable Zoom conferencing
- Video recording
- Direct controls interface
Overview
Content Tools