IP address: 134.79.218.154
Subnet Mask: 255.255.252.0
Default Gateway: 134.79.219.1
IP address change:
- Control panel
- View network status and tasks
- Click on ethernet connection
- Properties
- Internet Protocol Version 4(TCP/IPv4) → properties
- Change IP address to 134.79.218.--- (like 100)
- Subnet mask to 255.255.252.0
- No need for default gateway
What to do?
- Retrieve parameters
- save them on a file on the pc
- Address the questions of the SmartMotor on the controller
- Figure out how to connect the motors to the controller
Aerotech BMS60-A-D25-FLB-E1000ASH-15DM (BRUSHLESS MOTOR):
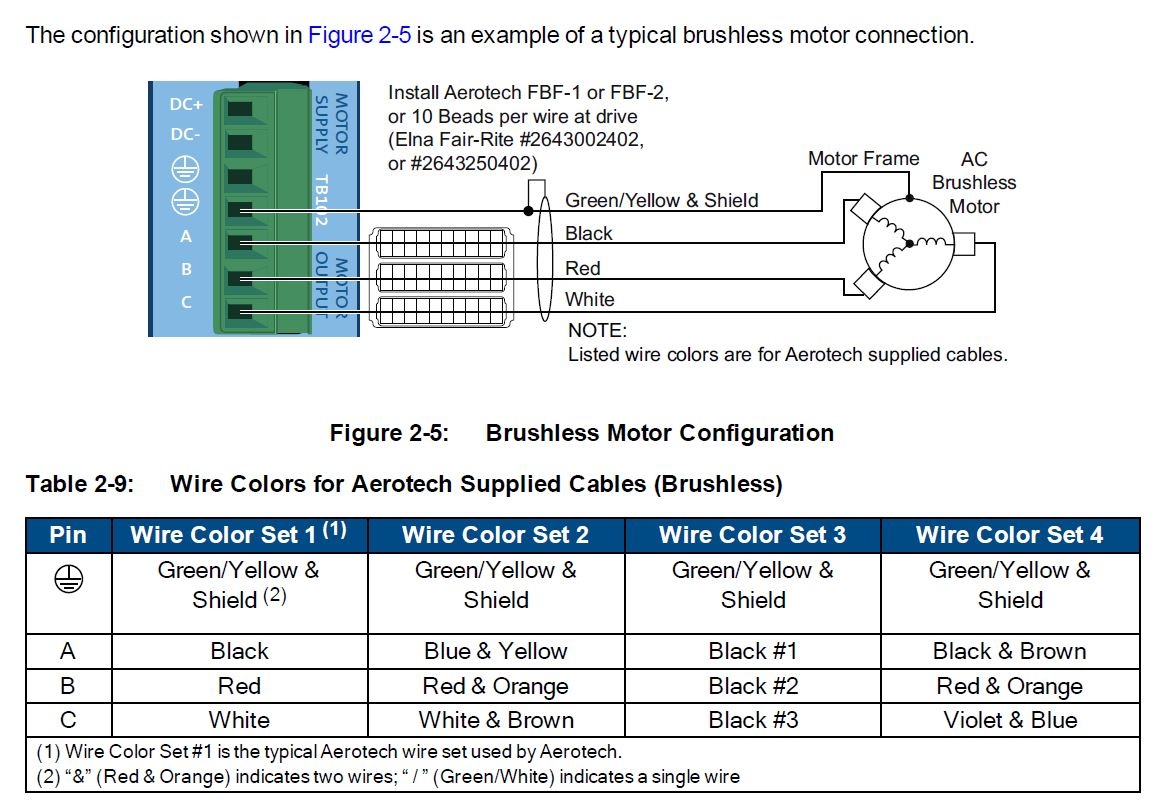
fig 1: brushless motor connections
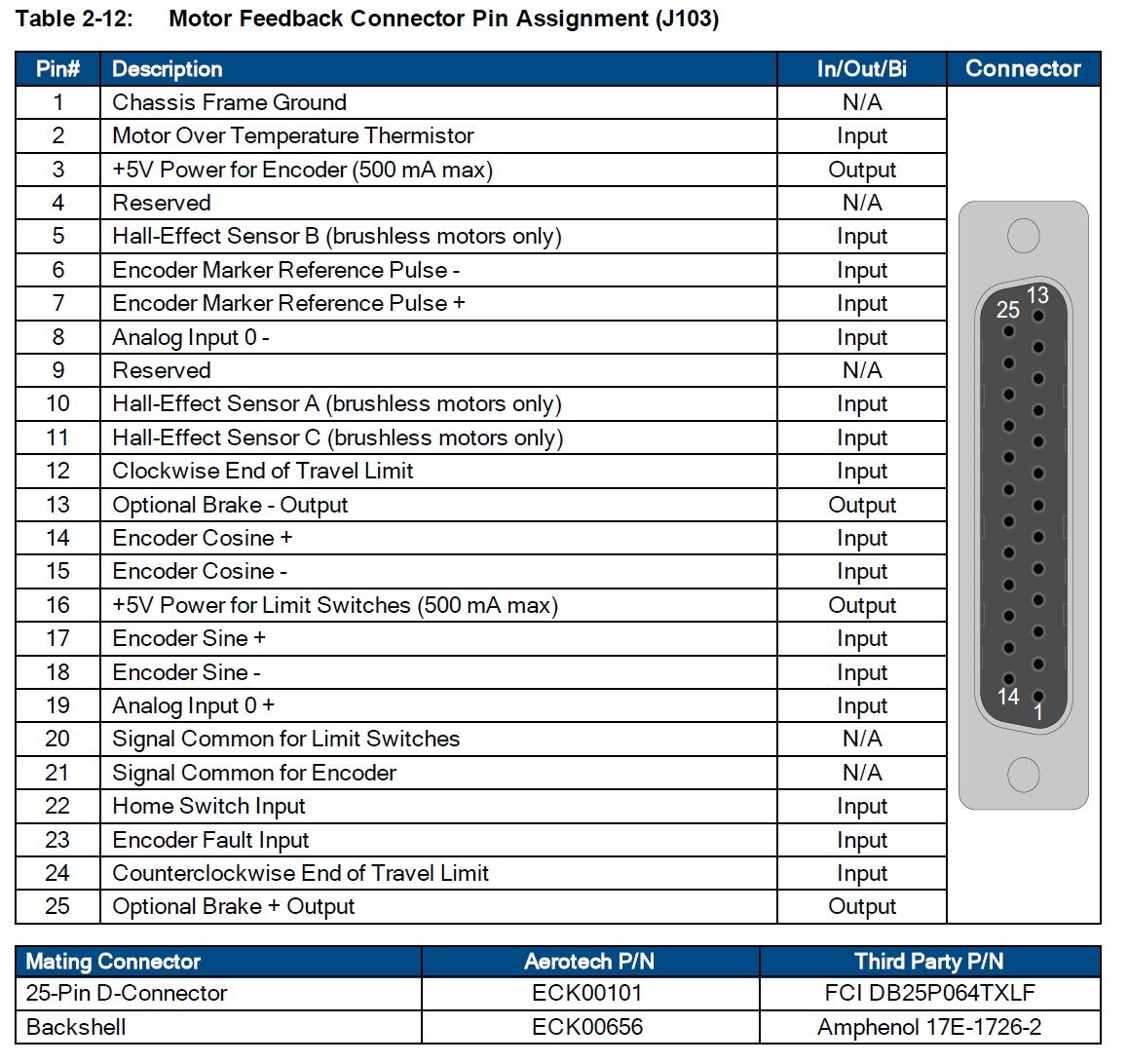
fig 2: feedback connections
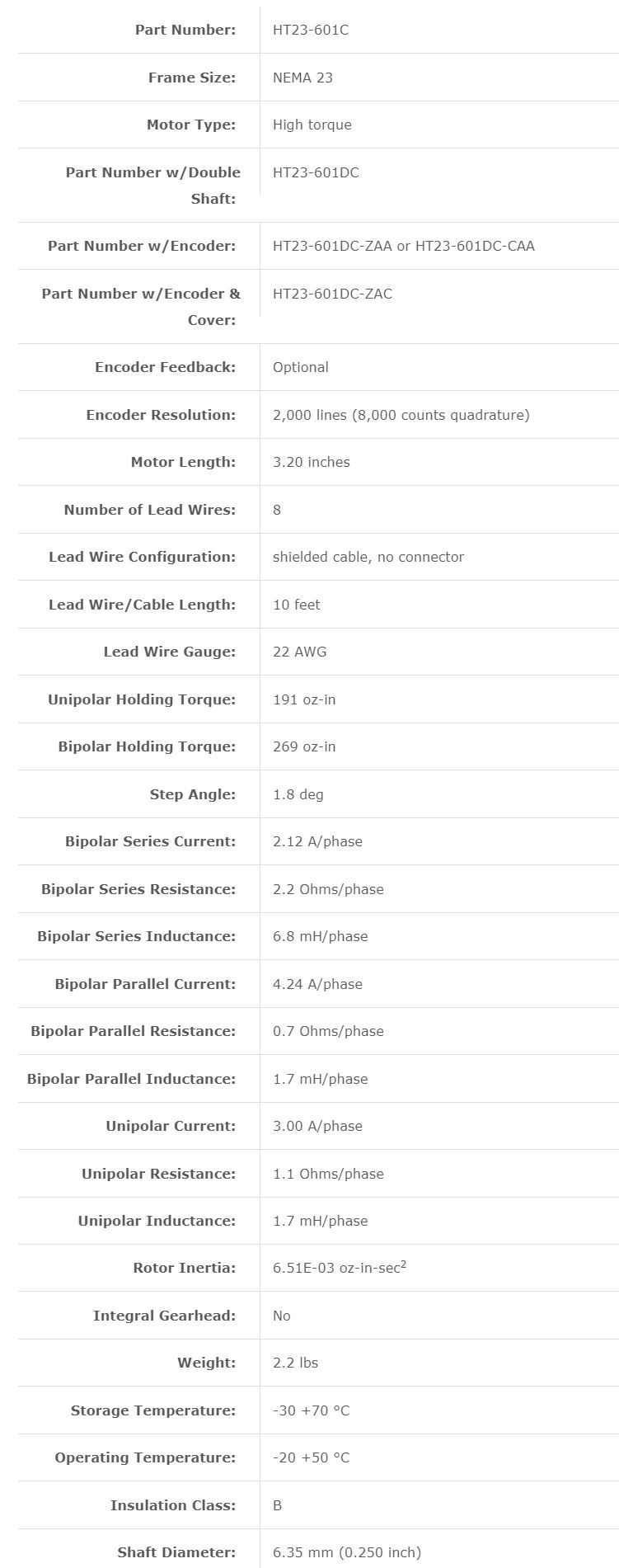
fig 3: specs