WIP
Locked for edits: 10/13
Published: 10/16
SC Readiness
A Run 21 readiness workshop was held in early September to review preparations for the arrival of the LCLS2 beam. After the workshop an LCLS taskforce was formed to tackle some of the issues raised at the workshop. The effort is ongoing.
ECS created a Run 21 readiness dashboard you can review here:
https://jira.slac.stanford.edu/secure/Dashboard.jspa?selectPageId=14380
Any issue that is considered essential or important for the arrival of SC beam, or SC commissioning, KPP measurements, or validation measurements is labeled with an sc-readiness label and this makes it appear in the dashboard.
Supported Device List Update
We officially completed the epic to update the SDL after nearly a year. Please refer to the SDL for system design and support.
One item of note is the status of Micronix piezo actuators and drives. Due to some concerns over reliability, these drives have been marked as EOL, meaning they are not approved for new designs. Existing configurations are still supported, as are purchasing replacements for existing configurations. For more information contact Tyler Johnson .
TXI installation for RP air attenuation test
TXI will conduct RP testing on the HXR line in March - April 2023. This test is to verify air attenuation models at different repetition rates.
During this long shutdown, the setup for the vacuum and motion lines was almost completed (October 2022) in the FEE. Panel B940-009-R17-DRL-01, B940-009-R17-DRL-02, B940-009-R17-DRL-03 and, B940-009-R17-DRL-04 are now installed and grounded on the alcove, and the FEE device cables (GCC, GPI, VGCs ) tested using the test boxes by Josue.
DC panels and cables were installed in H1.1 in the middle of September.
The devices will be shortly added to the PLC by Jyoti. All the long-run cables needed for the RP test have been properly pulled but not terminated due to a shortage of connectors.
The vacuum panels and cables are almost ready to install for both, HRX and SRX, lines. The installation work will continue in the coming weeks in Hutch 1.1.
Soft-limit display issues
There has been a long-standing bug where, for specific motor types, the python classes could fail to notice that the limit positions have updated, causing inconsistencies between the display limits, the limit protection in the python layer, and the limit protections in the motor IOCs. This has been fixed.
The source of this bug is differing behavior in how certain motor IOCs update their limit metadata and possibly how this metadata propagates (or does not propagate) through the channel access gateways.
Auto-pitch on the offset mirrors
Better power supplies for 901
Federica Murgia For safety reasons, all the DRL power supplies in building 901 have been replaced by desktop power supplies.
The new 24V desktop power supplies are currently stored in office 113 F, and they can be used only for the racks in building 901.
Each power supply comes with a power cord and a 24V power supply cable 3ft long (they are all labeled).
Note: each power supply can handle more than one PLC, but the current range is 0 ~ 11.67 A.
You can find more information about the first power supply inspection and the new power supply on this confluence page.
Please, update the equipment track sheet if you take one of them.
Improvement of python environment testing
Imaging systems and network impact analysis
We've recently looked into some theoretical limits for running imager systems (gige cameras) in the hutch subnets. The methods, reasoning, and conclusions can be browsed at Understanding Camera Network Traffic Limits.
It's been observed in TMO that we aren't quite stable for triggered gige cameras as we approach these theoretical limits, which can cause dropped frames that can be problematic for DAQ data. Efforts to stabilize these is ongoing.
Ion Pump QPC Controller Issues, Improvements Incoming
We contacted Gamma Vacuum regarding issues with long-run ion pump QPC controllers and their noisy signals in August. This led to a meeting with Edwards Vacuum, their partner company, where we discussed a temporary solution to update the firmware with an unreleased version. This unreleased firmware was also being used to solve similar issues in Germany as well as in AD at SLAC. In October, we updated the firmware on B940:009:R03:PCI:01 inside of the FEE. This improved the stability of the pressure report on two of the three working ion pump channels, however there was still some variance in the third channel.
A second ongoing issue is the inability to run all four QPC channels at once without error. When all four channels (and sometime even three or two) run, the device will eventually error-out all channels. These topics were discussed with Edwards as well, but this fix is to replace the CPU chip in each QPC or to procure completely new QPCs with necessary hardware updates. All QPCs with the 4-channel error must be sent back to Edwards so that they can replace this chip, but this is not possible with supply-chain issues and critical dates for beam. We are pushing to get new QPCs, which were ordered last year, to be prioritize in their backlog so that we can replace these controllers and send the defective ones out to be fixed.
In addition, there have been multiple problematic ion pumps on the HXR line that have been delivering lackluster vacuum levels for months; The worst of which even had to be replaced at one point. After a long RMA process due to the aforementioned supply chain issues, the controller for all of these pumps was swapped for a freshly RMA'd one. While the pumps are able to stay on consistently now, they are still delivering lackluster vacuum levels. They have been Hi-Pot tested and the worst performing pump was determined to fail the hi-pot test. This debugging process is ongoing.
LCLS-II-HE
The HE Controls team have presented their preliminary design for 4 out for the 7 L5 WBS: XPP instrument controls, MFX instrument controls, FEE and XRT area and Common components controls design. Pending the review report, the team is ready to start Final designs. Preliminary design activities for the other areas are on track with good engagement from the team. Activities for 3B reviews and drilldowns preparations are in progress.
Validated Machine Configuration Database Project Update
Alex Wallace Validated Machine Configuration Database System Project
The latest news on the project is that we have a concept demo up and running. We still need to find some bandwidth to polish the frontend, and then we'll be ready for a release. Aiming for early November.
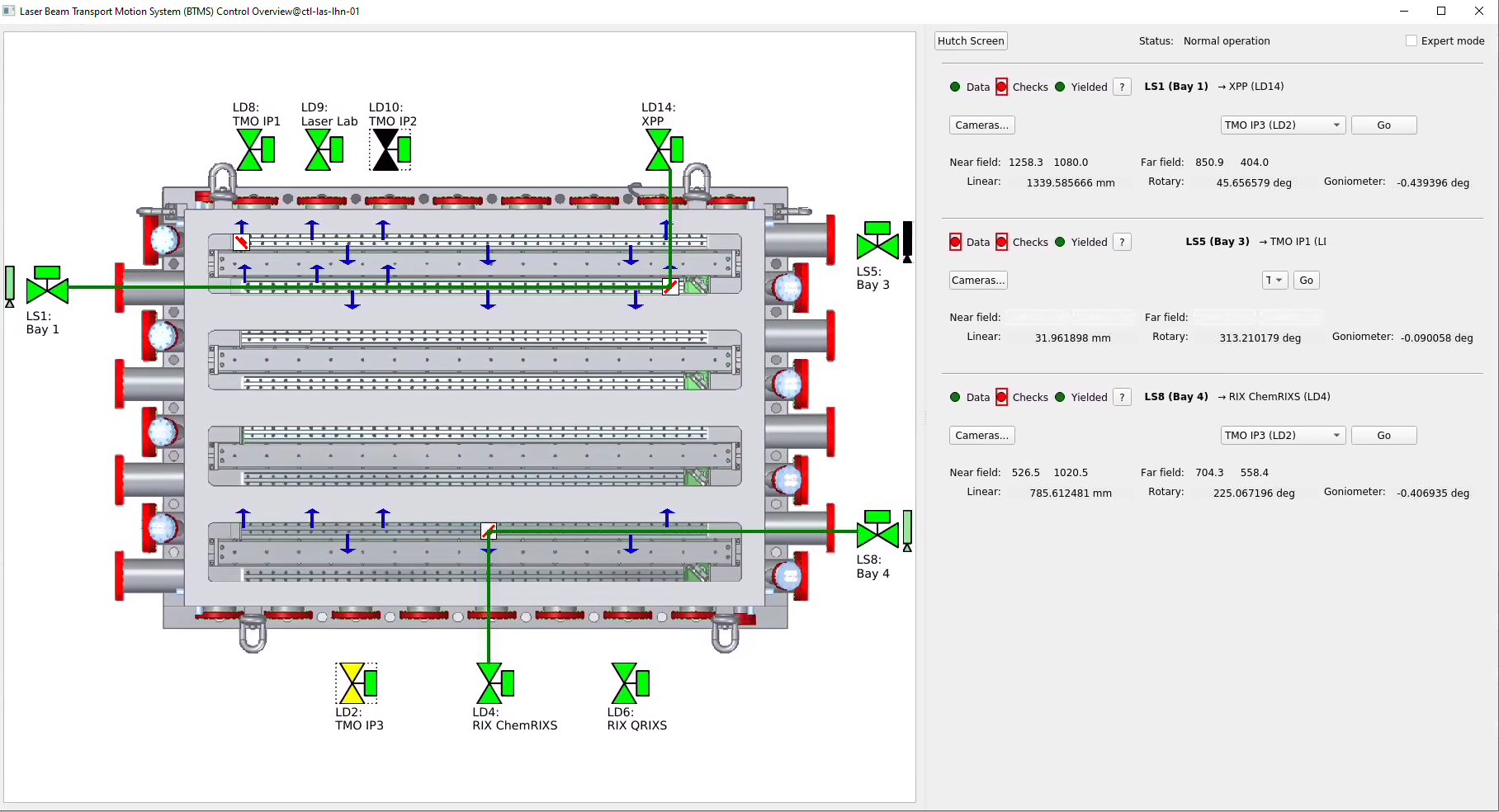
Laser, Beam Transport System (BTS)
A new motion control screen and back-end system was developed and deployed for the NEH Beam Transport System. This system includes configurable, archived values for nominal beam delivery positions from every laser source to every laser destination, automated source → destination motion control, and protective logic checks to protect against equipment damage. The system determines laser destination based on motor position, making the active laser destination available as PVs. The GUI provides graphical feedback of motor positions, as well as estimated beam delivery based on system state (see the green lines below representing the approximate beam path).
EPICS Collaboration
The 2022 EPICS Collaboration Meeting took place this year in picturesque Ljubljana, Slovenia.
The meeting was hosted by Cosylab, with the workshops taking place at their headquarters and presentations at Jožef Stefan Institute.
There were over 100 attendees (in-person and virtual). Of the in-person attendees, 32 were external to Cosylab.
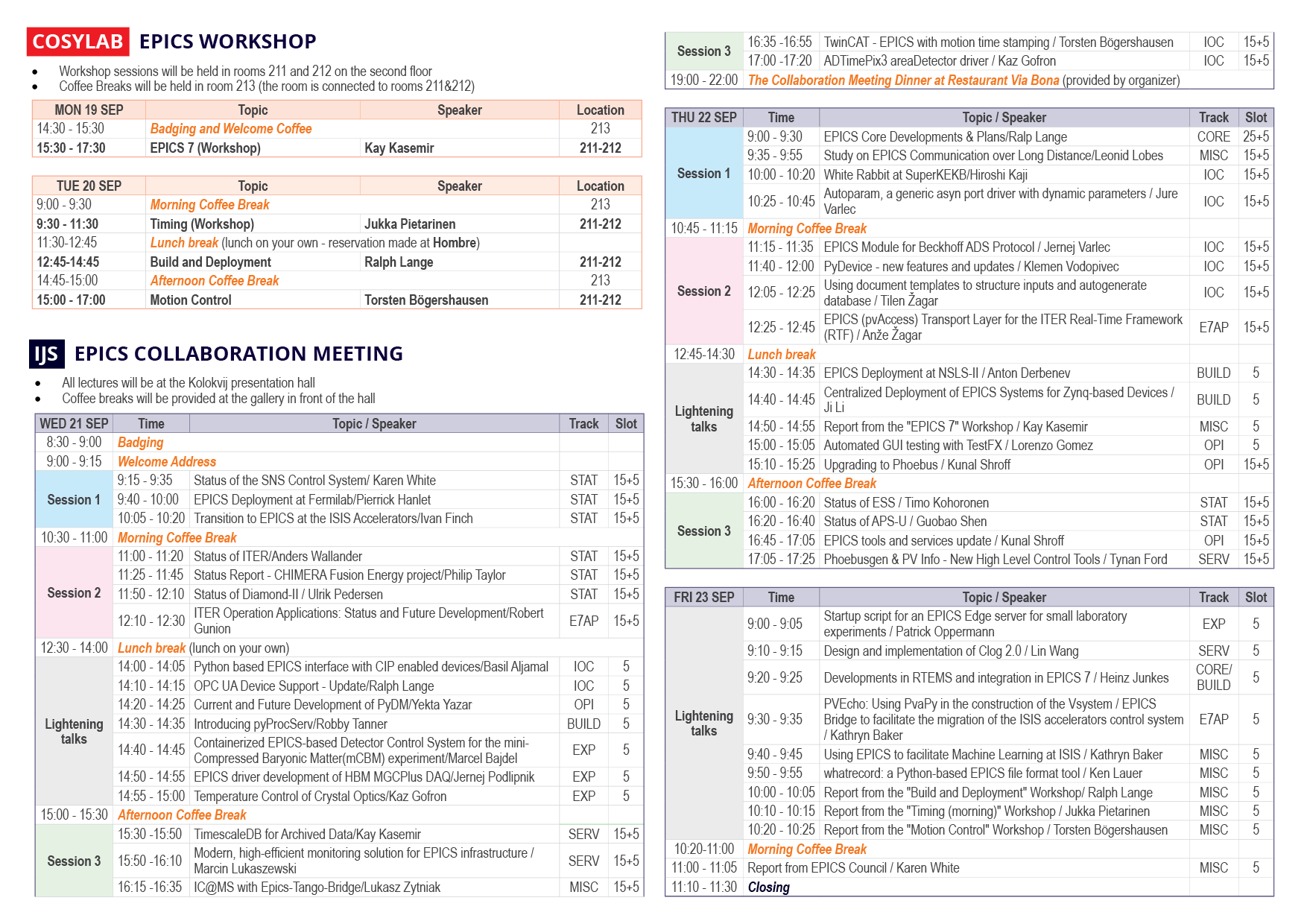

Several SLAC and local Cosylab engineers were fortunate to be able to join the meeting in person this year.
The first day was dedicated to an EPICS 7 workshop, run by Kay Kasemir.
The second day of workshops included Timing (Jukka Pietarinen), Build and Deployment (Ralph Lange), and Motion Control (Torsten Bögershausen).
SLAC talks included Current and Future Development of PyDM (Yekta Yazar) and whatrecord (Ken Lauer).
ATEF
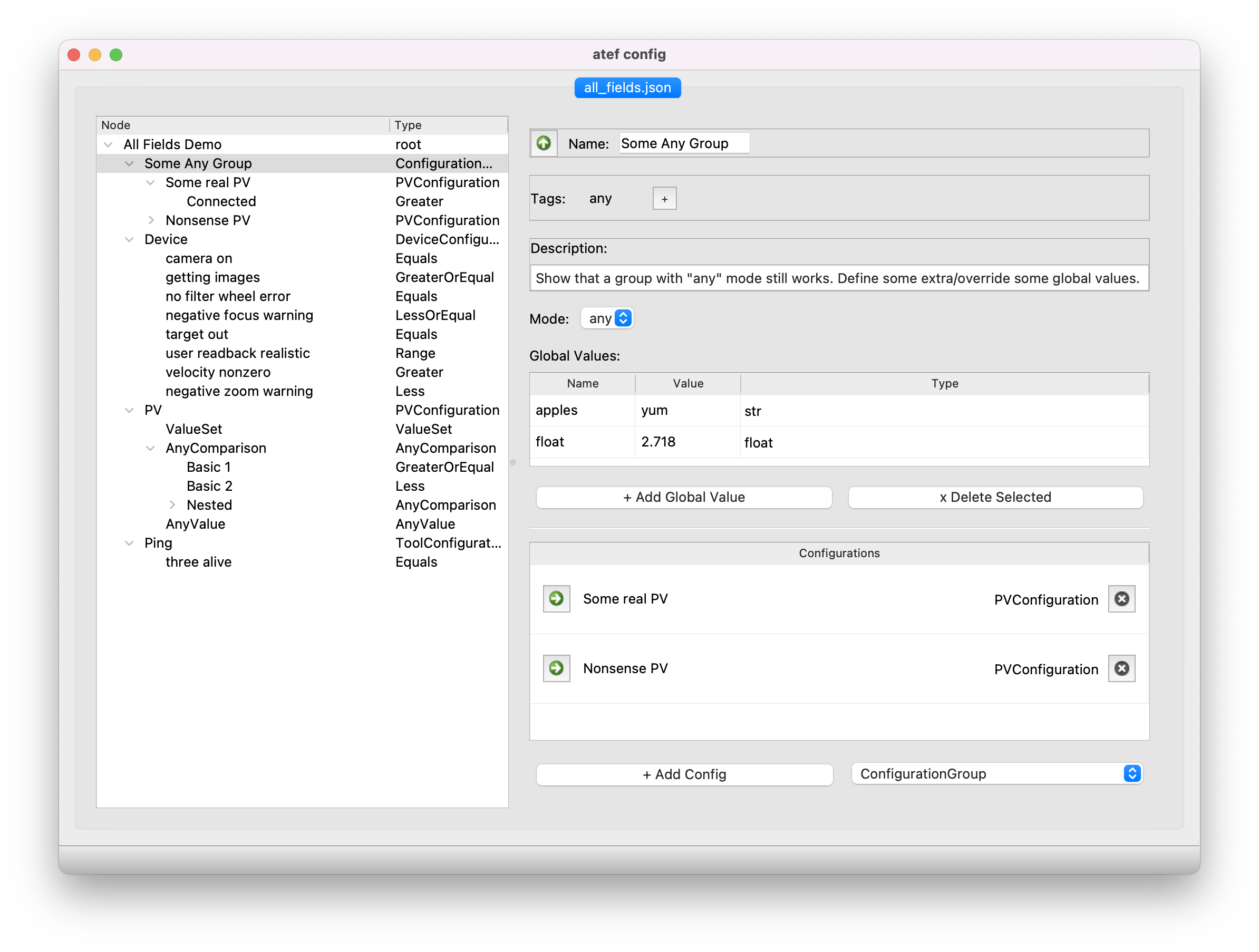
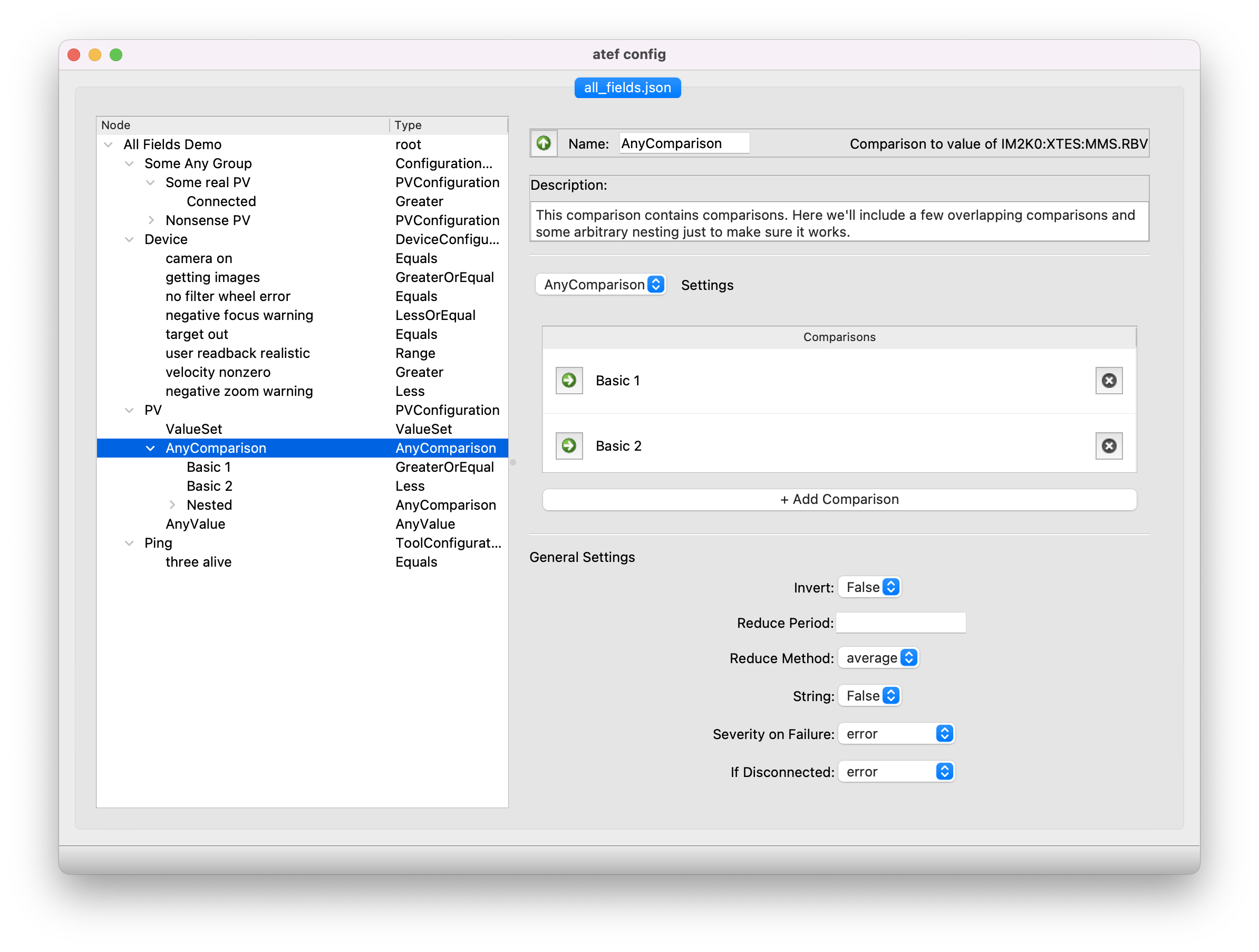
Since the last newsletter, the passive check configuration scheme in ATEF has been reworked. ATEF now supports user-specified groupings of passive checks.
The configuration GUI (graphical user interface), pictured above, is currently being reworked in order to be able to support this new and flexible format.
LY45
LY45 (CVMI with complicated new configuration) was delivered successfully. Control did lots of work including adding new manipulator in the beam line, moving two piezo motors from LAMP to CVMI, redefining CVMI six motion axises, rearranging CVMI vacuum design. All works very well and TMO decides to keep the new manipulator into the beam line and adding two more piezo motors into CVMI gas jet later because the good experience of LY45.
Lightpath
Lightpath is coming along nicely. As the major work on the UI approaches completion, our focus shifts to updating existing devices to fit the new lightpath interface.
Previously many devices did not ready themselves for lightpath, or did so half heartedly. Most devices were straightforward to update, with some more complicated devices
requiring more investigation (eg. the various offset mirrors). We are doing our best to update and test these devices thoroughly, in order to minimize disruptions during deployment.
With the changes to the lightpath interface, we have updated the package documentation to include information on what lightpath expects and how to ensure your python / ophyd device can be read by lightpath. (https://pcdshub.github.io/lightpath/)
A lightpath demo has been set up, try it by running: (and let Robert know if anything doesn't work)
/cds/home/r/roberttk/lightpath_demo/test_lightpath.sh -h
For basic usage notes: Lightpath basic usage
Hello, Goodbye
| Jasmine, Nguyen joined the ECS Platforms Development team as a Staff Engineer 1, Controls System integrator, with a previous background in industrial controls. Studying mechanical engineering, mechatronics engineering, and sustainable manufacturing, Jasmine contributed to the SLAC sponsored, Spatial Alignment With Machine Vision Robot project at CSU Chico. When Jasmine is not on a rock, they can be found at a skatepark, ice rink, or ski resort. |
| Aron Rezene is a new intern from Washington, DC, joining the LCLS Exp. Control Systems Delivery Team. As an undergrad in Physics at SUNY Oswego, he fancied extracurricular studies in DSP & control systems engineering along with C++ to complement the experimental practices used in physics research. His personal interest include embedded systems and computational physics and before joining SLAC, he served as a test intern measuring thermal impedance of SiPh lasers at the LiDar startup Aeva. His indoor hobbies include chess and watching Arsenal matches, but he prefers to spend free time outdoors, playing soccer, catching up with friends, or going for a hike. |


We waved goodbye to Tyler Pennebaker in August as he prepared to set off for graduate school at UCSB. You can read his kudoboard here.
Jira
If you can't see these Jira plugins, please log into Jira/ Confluence. If you can't log into Jira, send mail to apps-admin@slac.stanford.edu and ask to be added to Jira.
Getting issues...
Overview
Content Tools