Target Release Date
Final edits due
Introduction
HE update
Roles and Team update
L2HE Project Roles and assignment table can be found here.
MECU-update
Rack allocations
Other controls requirements
LLE+LLNL Visit
Hutch Python Update
Hutch python's conda environment was updated to pcds-5.3.1 near the start of April
You can read the full release notes here: PCDS Conda Release Notes: pcds-5.3.1
Robert S. Tang-Kong Zachary L Lentz
Position Lag Monitoring
- Add metric plots
- Add any conclusions drawn regarding this issue, and corrections.
- Would be nice to see the counts trending down on account of some PLM threshold changes.
Lightpath Campaign
Robert S. Tang-Kong Zachary L Lentz
New ECS PD Campaign: Code Review
First Deployment of ATEF
QRIX Controls

The Spectrometer Arm has been installed and checked out. The spectrometer arm has a total of 27 axes installed with coupled and coordinated motion with strict EPS requirements. The acceptance test went very well with Toyama and even were complete ahead of schedule.
The QRIX vacuum PLC code has been merged with that of the spectrometer arm. The vacuum controls integration is complete for all the installed devices.
TXI
Facility Monitoring System Update
Cynthia Melendrez Tyler Johnson
Radiation Monitoring in the FEE
We began taking initial Radiation measurements in the FEE! From four different locations we gained 2 sensor readouts each. Here we see Hard Xray beam energy mapped against dose rates.
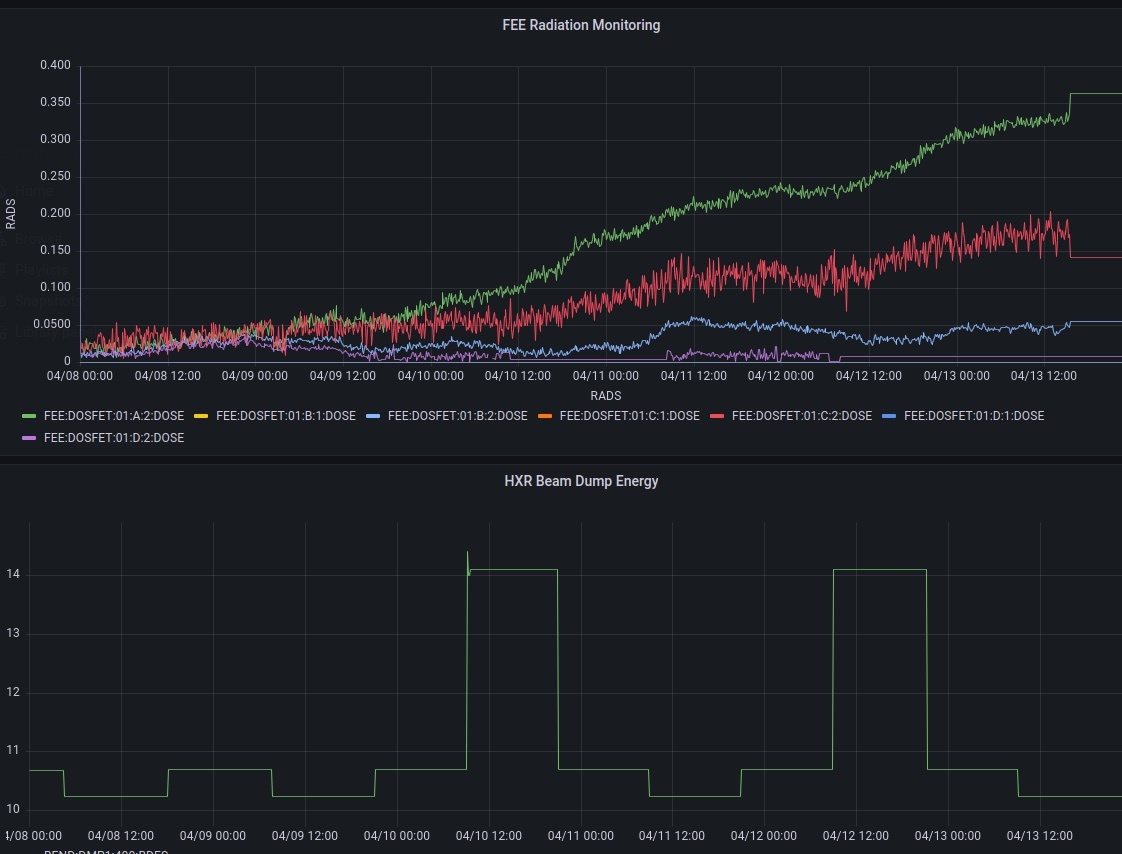
A shift was made to bring the rest of the sensors online. Looking forward to collecting more data this month!

X-ray Optics Controls Updates
MR1L3, MR2L3, and MR1L4 XRT HOMS Mirrors
- State Control fully implemented! We can now reach mirror coating positions and move the mirrors in and out of the beam with one click!
- Temperature sensors added to XRT HOMS Temperature

MR1K4 FEE TMO Mirror
- Newly upgraded with coating state control.
- PMPS states implemented.
MR3K4, MR4K3, MR2L1, and MR3L1 TXI Mirror
- Site Acceptance complete: TXI SAT
MR4K4, MR5K4 TMO DREAM Mirror
- Granite installed/Mirror moved into the hutch.
- Controls fully checked out: link
- Coming: Internal RTD, Pressure, and Flow Sensors.
MR2K4, MR3K4 TMO LAMP Mirror
- Look for some higher performance in the axis control
- Control loops changed and Deadbands tightened
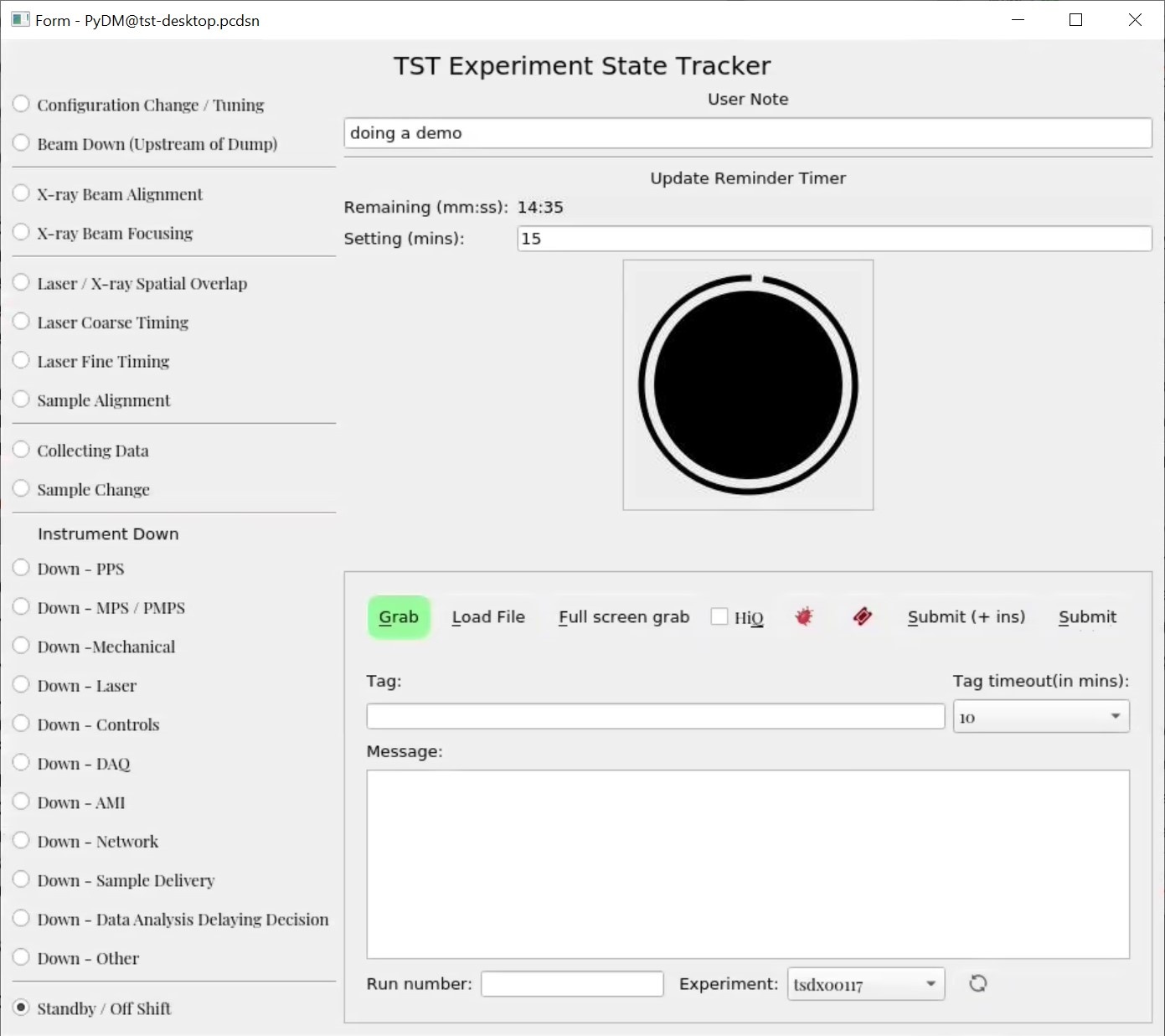
Experiment State Tracker and Eloggrubber
Based on popular demand, the Experiment State Tracker has been integrated with the eloggrubber and the possible state list has been extended (with much more detail for 'instrument down' in particular.)
The eloggrubbers JIRA implementation has changed to allow automatic assignment to the instruments as well as posting of the attachments Murali Shankar
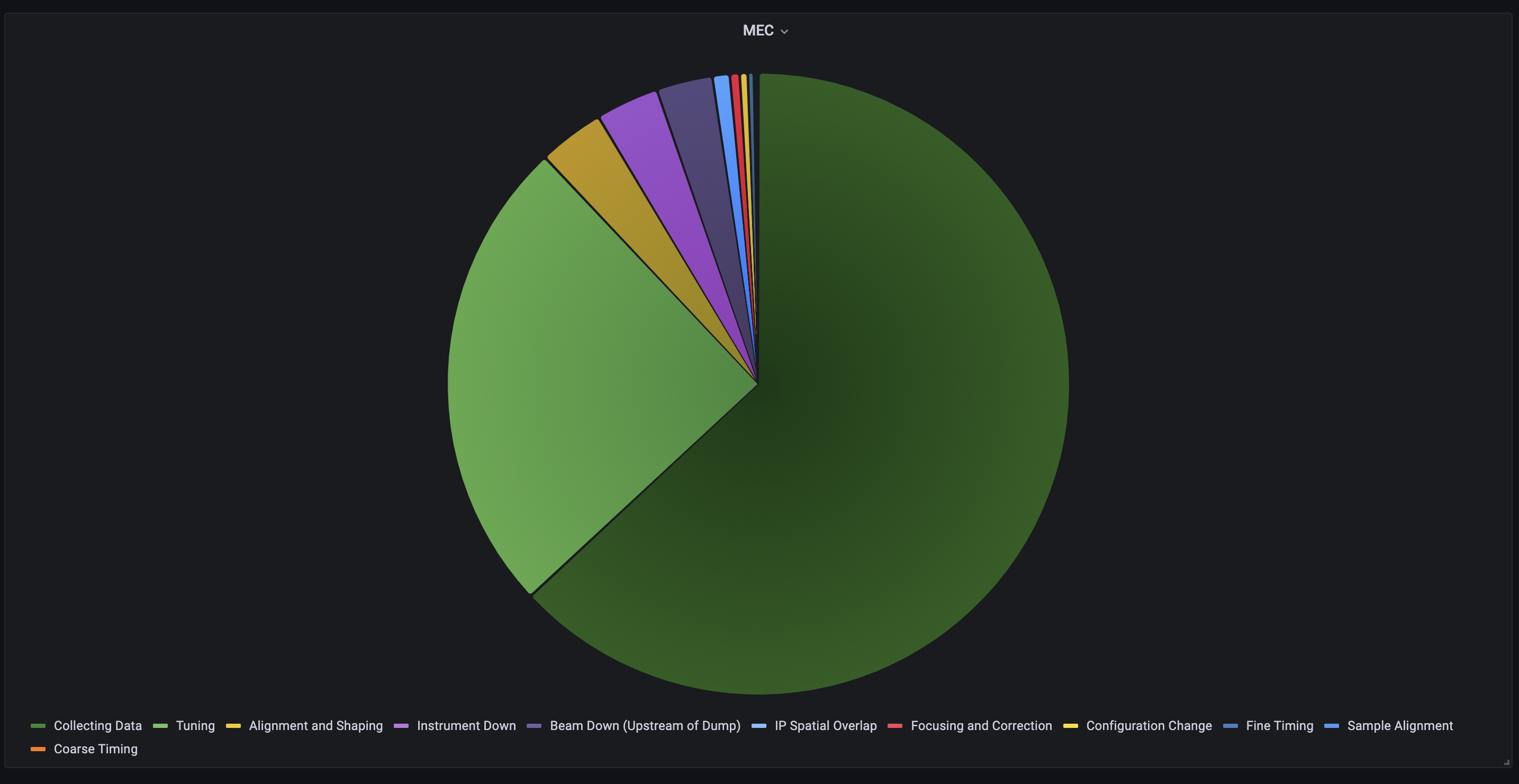
Grafana has also been extended to allow the creation of piechart data from the archived Experiment State Tracker output.
Jungfrau [0.5/1]M IOC
The smaller jungfrau detectors which use a Rohde-Schwartz power supply now have an IOC (ioc/common/roving_jf) to make the process of turning them on/off consistent with the various epix-detectors. This IOC will trip the detector should a problem with the chiller flow or power supply is detected.
Timing moves to RHEL7
CSU Chico Engineering Capstone Collaboration
This year Diling Zhu has sponsored the collaboration project (many thanks Diling!), which is to develop a prototype system for determining interaction point alignment using machine vision. In early March, the CSU Chico Engineering Capstone Collaboration project team visited XPP to do some final fit measurements around the interaction point for installation of their project later this year.
For the past five years LCLS departments (SED and ME) have sponsored projects with the Mechanical/Mechatronic Engineering departments of CSU Chico for their engineering degree capstone. Each year the collaboration project offers a chance for LCLS to develop prototype concepts, or even to offload a manageable portion of work to a team of 4-5 students and a faculty advisor (for a nominal fee + M&S). More importantly these projects offer us a chance to discover talented candidates that we can hire. If you have an idea for a project, please contact Alex Wallace for details. On a final note, this year we are excited to announce that we hired another student from the collaboration project, Mitchell Cabral. He will join ECS as a control system integrator in June.
Overview
Content Tools