Page History
...
- Pixel size: 13.5um X 13.5um
- Sensor size: 27.6 mm X 27.6mm
- Gap size: 10.9 mm
- Array shape (2, 2048, 2048) or re-binned, ex. (2, 512, 512)
Data access
| Code Block |
|---|
psana -m EventKeys -n 5 exp=sxrk4816:run=1 EventKey(type=Psana::Andor3d::FrameV1, src=DetInfo(SxrEndstation.0:DualAndor.0), alias="andorDual") EventKey(type=Psana::Andor3d::ConfigV1, src=DetInfo(SxrEndstation.0:DualAndor.0), alias="andorDual") # Get n-d array average: det_ndarr_average -d exp=sxrk4816:run=1 -s SxrEndstation.0:DualAndor.0 -f nda-andor3d -p -v |
...
/reg/g/psdm/detector/alignment/andor3d/calib-andor3d-2016-02-09/calib/Andor3d::CalibV1/SxrEndstation.0:DualAndor.0/geometry/07-end.data
| Code Block | ||
|---|---|---|
| ||
# TITLE Geometry parameters of Andor3d # DATE_TIME 2016-02-09 09:00:00 PDT # METROLOGY no metrology available # AUTHOR dubrovin # EXPERIMENT SXR # DETECTOR SxrEndstation.0:DualAndor.0 # CALIB_TYPE geometry # COMMENT:01 This is a first file for Andor3d made by hands # COMMENT:02 All translation and rotation pars of the object are defined w.r.t. parent object Cartesian frame # COMMENT:03 Detector geometry: Sensor size 27.6 x 27.6mm, Pixel size 13.5 x 13.5um, distance between chips is 10.9mm. # PARAM:01 PARENT - name and version of the parent object # PARAM:02 PARENT_IND - index of the parent object # PARAM:03 OBJECT - name and version of the object # PARAM:04 OBJECT_IND - index of the new object # PARAM:05 X0 - x-coordinate [um] of the object origin in the parent frame # PARAM:06 Y0 - y-coordinate [um] of the object origin in the parent frame # PARAM:07 Z0 - z-coordinate [um] of the object origin in the parent frame # PARAM:08 ROT_Z - object design rotation angle [deg] around Z axis of the parent frame # PARAM:09 ROT_Y - object design rotation angle [deg] around Y axis of the parent frame # PARAM:10 ROT_X - object design rotation angle [deg] around X axis of the parent frame # PARAM:11 TILT_Z - object tilt angle [deg] around Z axis of the parent frame # PARAM:12 TILT_Y - object tilt angle [deg] around Y axis of the parent frame # PARAM:13 TILT_X - object tilt angle [deg] around X axis of the parent frame # HDR PARENT IND OBJECT IND X0[um] Y0[um] Z0[um] ROT-Z ROT-Y ROT-X TILT-Z TILT-Y TILT-X ANDORDET:V1 0 ANDOR3D:V1MTRX:512:512:54:54 0 -330005400 0 0 90 0 0 0.0 0.0 0.0 ANDORDET:V1 0 ANDOR3D:V1MTRX:512:512:54:54 1 5400-33000 0 0 90 0 0 0.0 0.0 0.0 IP:V1 0 ANDORDET:V1 0 0 27600 0 -90 0 0 0.0 0.0 0.0 |
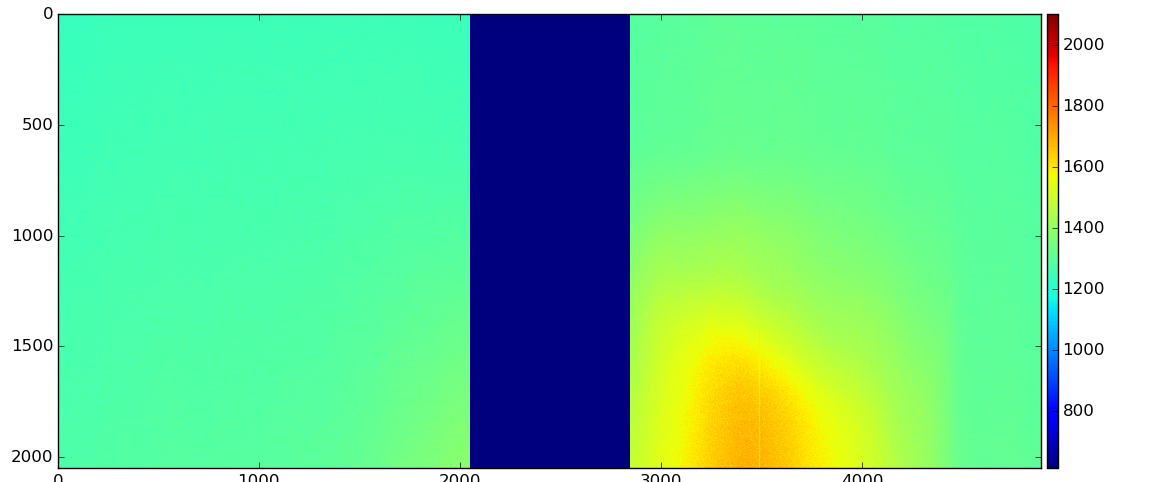
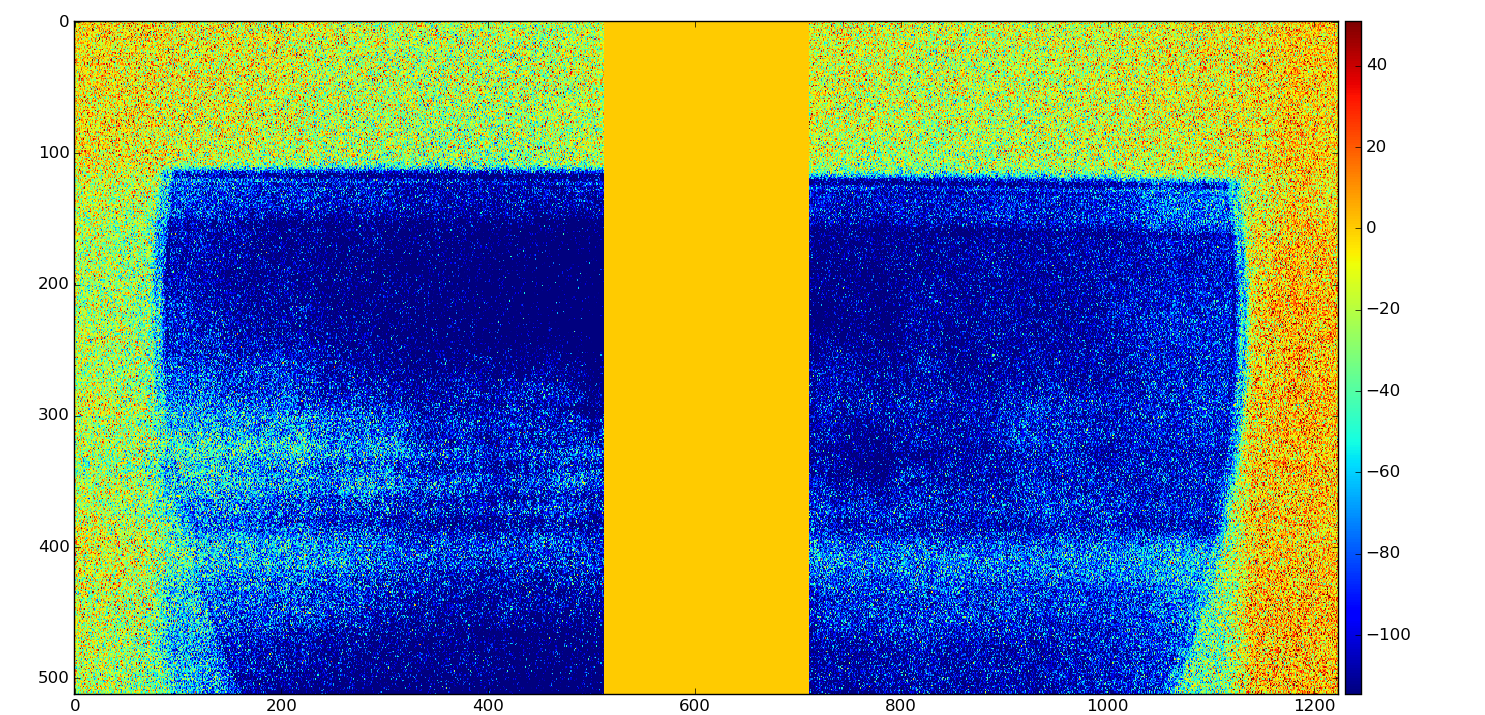
In order to support geometry of matrix-like sensors, the PSCalib.SegGeometryMatrixV1 object in PSCalib.SegGeometryStore.Create is initialized using variable shape sensor parameters coded in its name, for example MTRX:2048:2048:13.5:13.5, where values separated by colons stand for number of rows, columns, pixel size in rows and in columns in [um].
Images Image (Detector.image()) generated for this geometry file:geometry (2, 2048, 2048) and (2, 512, 512) using MTRX:2048:2048:13.5:13.5 or MTRX:512:512:54:54, respectively
References
...
Overview
Content Tools