Page History
...
The XRT had several disabled axes and nearly broken chassis that were causing all kinds of hackery and finagling for ops as a result of rushed commissioning. To make things better we decided to go through each chassis 1 by 1 and fix outstanding issues, enabling all axes, including bending. This post goes over what was fixed and changed, and why. Also you will find the
Objectives
- Enable all axes
- Fix all chassis
- Fix all cables
- Verify motion
- Verify all drive settings and capture on google drive
- Improve gantry tuning and control
- Misc improvements
Enable all the axes
I made a benchtesting procedure, while verifying the first chassis myself. I then trained Ivan on how to verify chassis on the bench and field. He then worked independently with Danh Du to complete the checkout for M3. Danh then completed the verification for M2 installation with May Ling.
With each verified chassis we had a solid reference for finding mistakes in cables. A loose wire on the bender motor cable for M1 was discovered. Other errors in the chassis were discovered during benchtesting. Sorting out the problems after chassis installation would have been painful (that's what we tried to do originally).
Ivan's Notes:
HOMS Chassis Bench testing Procedure
https://www.evernote.com/shard/s195/sh/2e401b24-a72c-4533-b743-82b4eb325ade/af309bb3f42be622
XRT HOMS M1 work log:
XRT HOMS M3 work log:
XRT M3 HOMS ELMO CHASSIS work
Bench test Chassis #1805527 (originally installed in XRT M3)
A dead piezo!
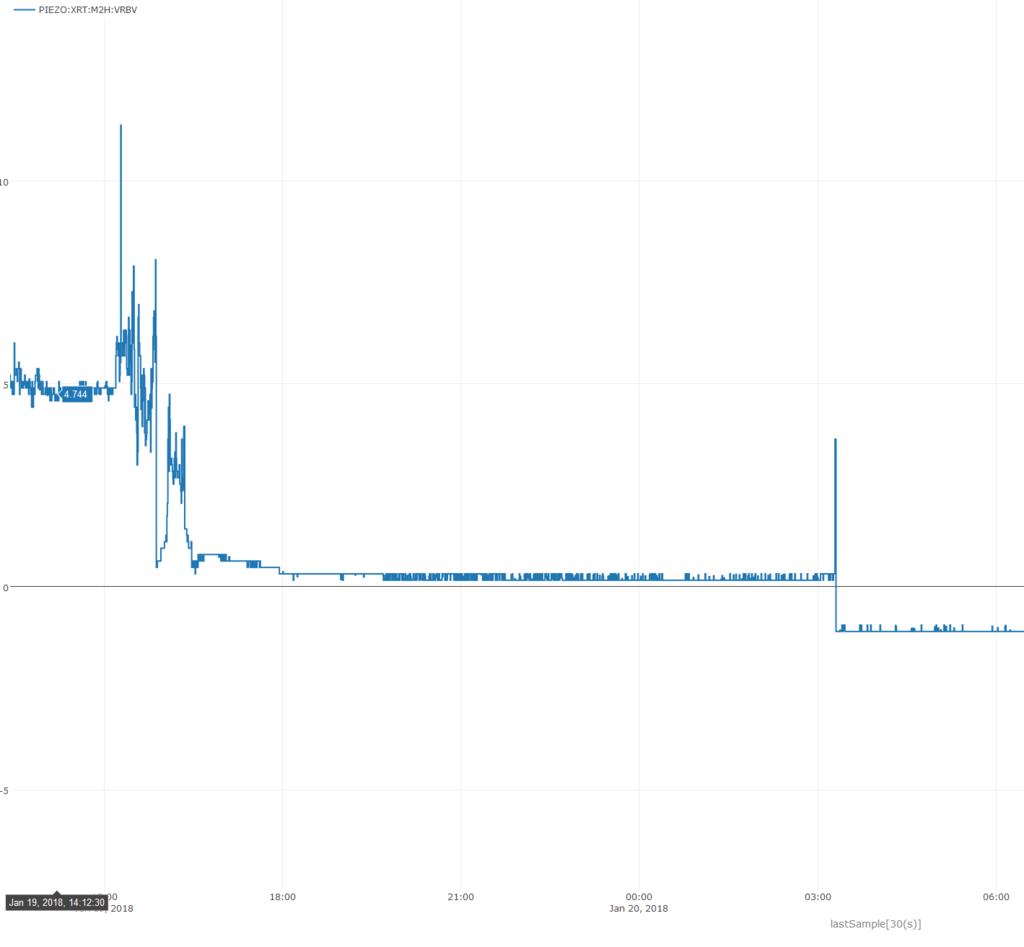
While recommissioning all the XRT HOMS we encountered a piezo failure on M2H. For no apparent reason the piezo died, and we had to scramble to replace it. Actually Corey and Daniele replaced it, while Teddy and I completed verification of all other axes. We don't understand why it failed. Here's the voltage from when it failed:
Improve gantry tuning and control
...
When moving the axes in gantry a gantry difference would accumulate over time. This would ultimately lead to a parasitic pitch. Each axis would move in-sync pretty well, but it might give up moving before it actually reached a final target, and each drive would give up on its own. This lead to a gantry error that would vary between +/- 100um10um. Not very good for pointing to 30nrad!
...
Overview
Content Tools