As the name suggests, Trilateration techniques uses three RTT values to estimate the
As the name suggests, Trilateration techniques uses three RTT values to estimate the coordinates of target node. In Trilateration technique, when several landmarks ping the specified Target, three landmarks with smallest RTT values (probably nearest located landmarks) are selected and then algorithm tries to estimate the location on the basis of overlapping region of the circles drawn around these selected landmarks. Figure.1 explains this in pictorial format. In Trilateration technique, the center of the overlapping region is considered as the location of the target node.
Figure.1 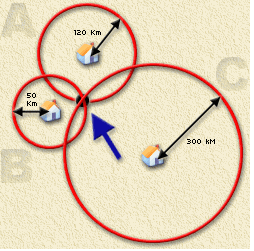
There are many ways to implement trilateration technique. Linear Least Square Method, Nonlinear Least Square Method , Circles intersection with Clustering and trilateration in 2D and 3D.
Previously we were implementing Linear Least Square Method to implement trilateration. With this method the 50% of targets showed Distance Error above 1000 km. Going through paper on ?Performance evaluation of a TOA-based trilateration method to locate terminals in WLAN? which is discussing different Positioning Algorithms. In this paper it is mention that Linear Least Square Method is not very accurate and it just provide initial position which can be used in other positioning algorithms (i.e. Nonlinear Least Squares and Independent Time GPS Least Squares) as the initialization value for their iterations.
Going through wiki for Trilateration implemention we found that method to be easy and straight forward.(http://en.wikipedia.org/wiki/Trilateration![]() ). But the algorithm mentioned on wiki is solving trilateration in 3D plane. We have implemented it in 2D plane.
). But the algorithm mentioned on wiki is solving trilateration in 3D plane. We have implemented it in 2D plane.
coordinates of target node. In Trilateration technique, when several landmarks ping the
specified Target, three landmarks with smallest RTT values (probably nearest located
landmarks) are selected and then algorithm tries to estimate the location on the basis of
overlapping region of the circles drawn around these selected landmarks. Figure.1
explains this in pictorial format. In Trilateration technique, the center of the overlapping
region is considered as the location of the target node.
There are many ways to solve trilateration problem. This method is based on solving the equations of circle.The Figure below shows the 3 circles drawn from each of 3 landmarks to the target. r1, r2, r3 are the radius of circles.
{kind=link}
P1=1st Landmark position in x,y coordinates
P2=2nd Landmark position in x,y coordinates
P3=3rd Landmark position in x,y coordinates
d1= distance from 1st Landmark to target (Calculated using distance=(MinRTT/2)*alpha)
d2=distance from 2nd Landmark to target (Calculated using distance=(MinRTT/2)*alpha)
d3=distance from 3rd Landmark to target (Calculated using distance=(MinRTT/2)*alpha)
i1=P1.x,
i2=P2.x,
i3=P3.x
j1=P1.y,
j2=P2.y,
j3=P3.y
x=target x coordinate
y=target y coordinate
Using Equation for circles and solving the above figure
x =
{ ( [ (d1^2-d2^2) + (i2^2-i1^2) + (j2^2-j1^2) ] * (2*j3-2*j2) - [ (d2^2-d3^2) + (i3^2-i2^2) + (j3^2-j2^2) ] *(2*j2-2*j1) ) /
[ (2*i2-2*i3)(2*j2-2*j1)-(2*i1-2*i2)(2*j3-2*j2 ] }
y = [ (d1^2-d2^2) + (i2^2-i1^2) + (j2^2-j1^2) + x*(2*i1-2*i2)] / (2*j2-2*j1)
x,y are the required coordinates of a Point (Target)
The performance of trilateration was quite improved as shown