Page History
...
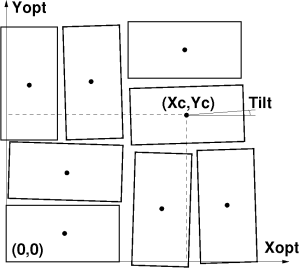
Tile center coordinates are defined as an average over 4 corners. Tilt angles are projected angles of the tile sides on relevant planes. Each angle is evaluated as an averaged angle for 2 sides.
Origin of the detector local frame is arbitrary. There are few preferable options for choosing coordinate frame origin:For example, for CSPAD with moving quads it is convenient to define
- 2x1 sensors' center coordinates in the quad use the same coordinate system as in optical measurements,
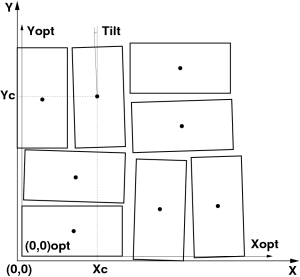
- apply minimal offset (translation) to optical frame in order to make all coordinates positive (see left plot below),
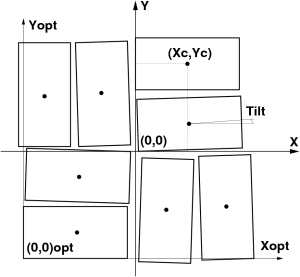
- use averaged coordinate of all tiles (see right plot below),
- use user-defined translation, for example set origin in the evaluated quad origins' coordinates with respect to the point of beam crossing with the detector plane. , as shown on plots:
Pixel coordinates reconstruction
Pixel coordinate reconstruction in the detector frame uses
- tile ideal geometry,
- tile center positions,
- tile N·90 rotation and tilt angles.
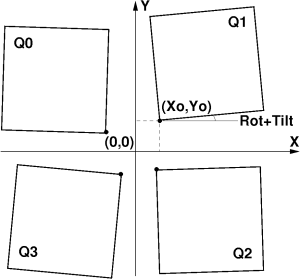
Then, each Each geometry object pixel coordinate xj are transformed to the parent frame pixel coordinate Xi applying rotations and translations as
Xi=Rij·xj + Pi,
...
Pixel coordinates in the detector should be accessed by a the method like
xarr, yarr, zarr = get_pixel_coords().
For example, Python interface for CSPAD
...
Overview
Content Tools